Cartographie 3D d'établissements souterrains et carrières souterraines

Le matériel mis en œuvre par explor-e lors des relevés est le dispositif ZEb-revo développé par la société GeoSLAM.
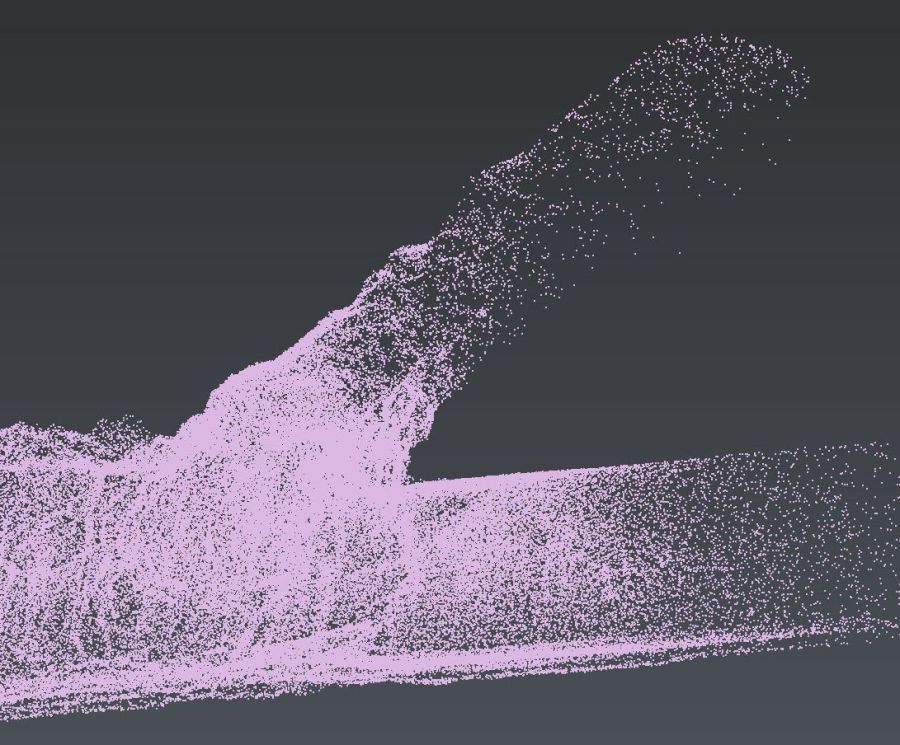
Comment ça marche ? : L'algorithme de GeoSLAM utilise des données provenant d'un capteur Lidar et d’une centrale inertielle (IMU). L'IMU est utilisée pour estimer une position initiale et créer un nuage de points à partir de laquelle des 'surfels' sont extraits pour représenter les formes uniques dans le nuage de points.
Spécifications :
Vitesse d’acquisition des données : 43 200 points de mesure / seconde
Portée maximale : jusqu’à 30m en intérieur
Champ angulaire : 270 x ~360 degrés

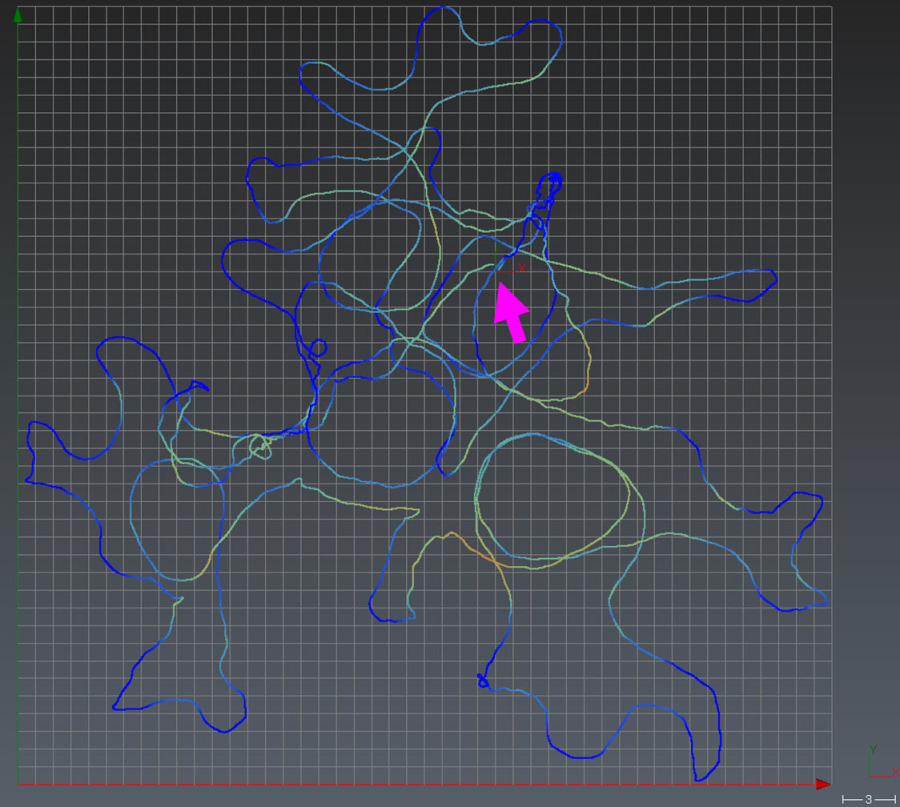
Afin d'optimiser la trajectoire et de limiter les dérives éventuelles de l'IMU l'acquisition est réalisée par déplacement de l'opérateur selon une une boucle fermée de telle sorte que les milieux de départ et d'arrivée sont adaptés de façon précise ensemble.
Les données relevés sont ensuite reprises via un logiciel dédié au traitement de nuages de points pour permettre, le cubage de la cavité, son report 2D en surface, sa reconstitution tridimensionnelle, le cas échéant l'établissement d'un film de présentation...



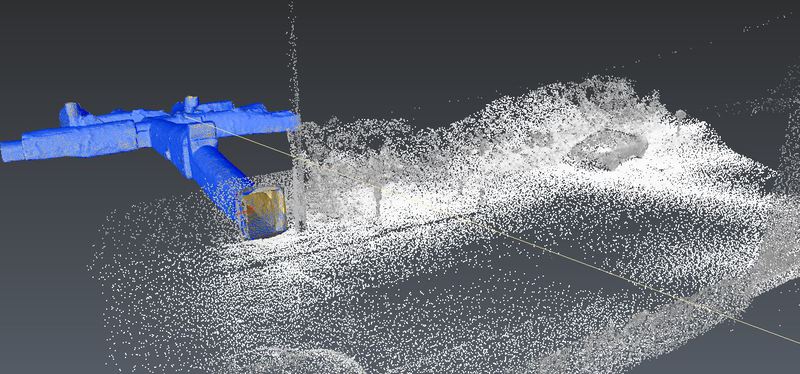
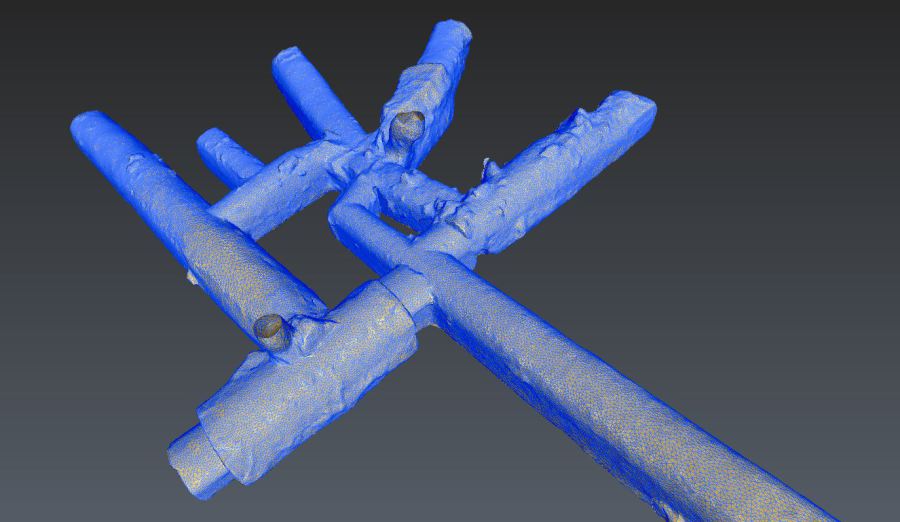
Exemples de relevés tridimensionnels
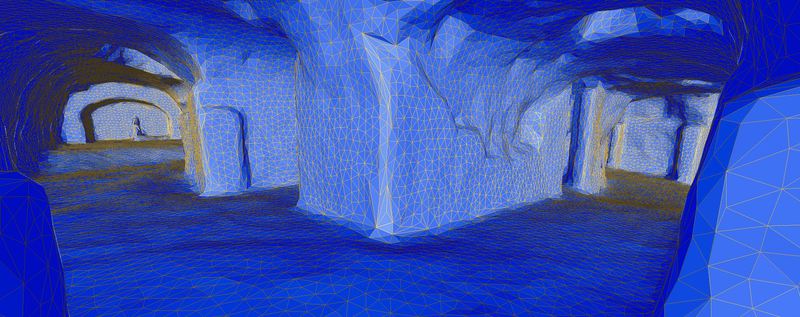
Visite virtuelle d'une marnière (3 étages dont les 2 supérieurs anastomosés - profondeur maxi 32m - volume 2 600 m3) d'après relevé tridimensionnel réalisé par explor-e

Modélisation réalisée à partir d'un nuage d'environ 3 000 000 de points.
Cartographie d'une ancienne glacière avec accès par cavage bouche
Cartographie partielle d'un ancien hopital militaire

Cartographie d'un fontis au ciel d'une ancienne galerie de mine de fer avant obstruction et comblement